Nachgiebigkeit eines Dynamischen Elementes (compliance)
\begin{document}
\begin{tikzpicture}
\draw [fill=green!50] (7,16.25) rectangle (11.5,14.25);
\draw [] (3.75,15.25) -- (7,15.25);
\draw [] (11.5,15.25) -- (14.5,15.25);
\node at (5.25,16) {F};
\node at (12.75,16) {x};
\node at (4.75,14.5) {input};
\node at (12.75,14.75) {output};
\node [color=black]at (9,15.25) {Mechanical System };
\end{tikzpicture}
\end{document}
Antwort eines mechanischen Systems gegenüber einer Kraft
Die Transferfunktion
Ausgang der Verschiebung über dem Krafteingang im Laplace-Bereich
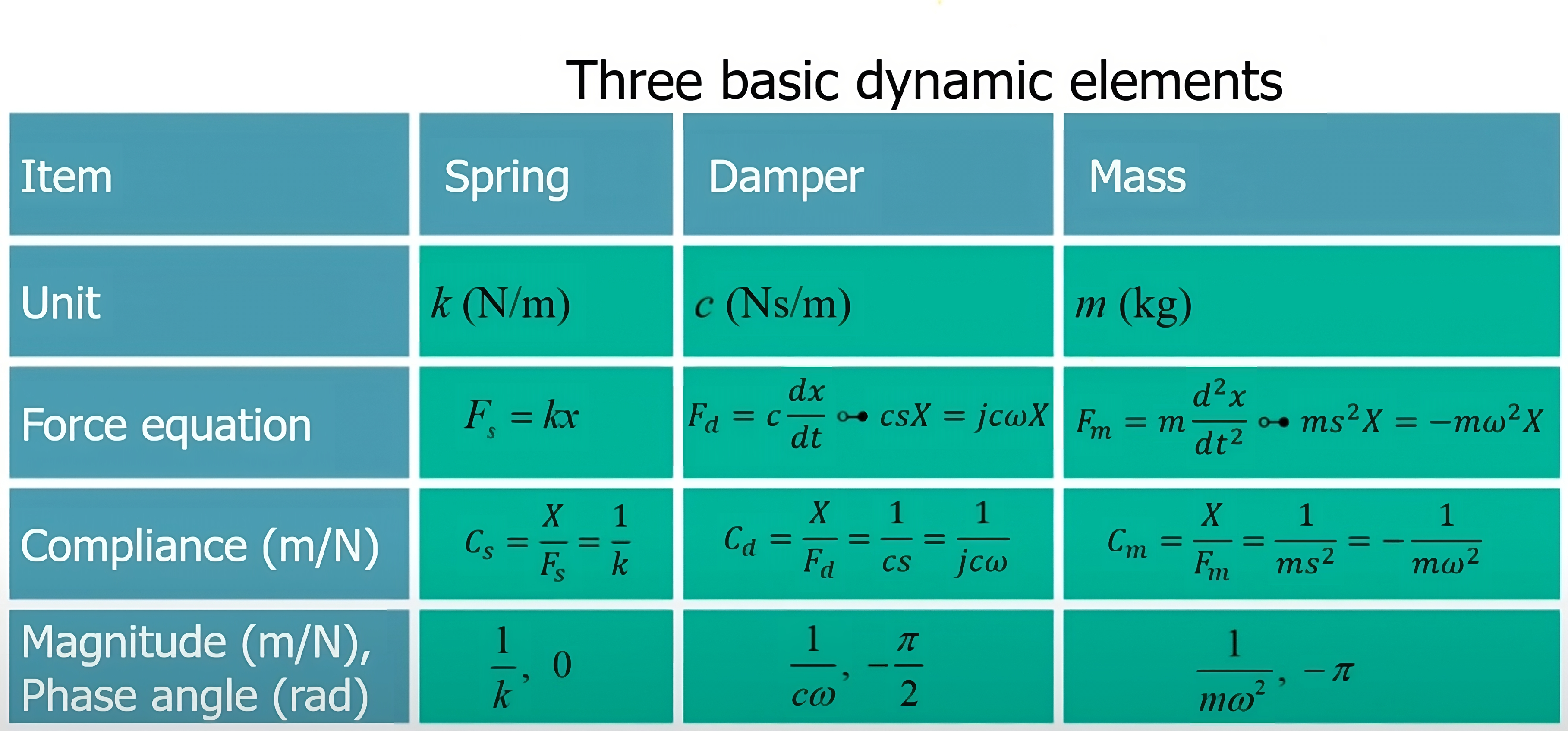
Nachgiebigkeit ist der Kehrwert der Steifigkeit
Je Steifer ein Element desto weniger Nachgiebig ist das Element.
Feder Masse System Erweiterung:
Geg:
Steifigkeit:
Dämpfung:
Masse:
Aktuator erzeugt eine Kraft
Störungen wirken auf der gleichen weise.
Die Differentialgleichung kann folgendermaßen gelöst werden:
- Homogene Lösung
freie Schwingung - Partikuläre Lösung
erzwungene Schwingung (Aktuatoren, Störungen)
Wir fokussieren uns auf die Partikulären Lösungen, weil wir die mechanischen Systeme steuern wollen.
Kräfte von Nachgiebigen Komponenten addieren sich
Overview of the dynamic properties
Die Sprungantworten im Amplituden Bode-Diagramm
Die Feder wird als Konstante über das Gesamte Spektrum dargestellt und die Amplitude ist kleiner je höher die Steifigkeit ist.
Die Masse wird mit -40dB pro Dekade dargestellt und je höher die Masse desto früher greift der Masse-Anteil.
Der Dämpfer hat eine -20 dB pro Dekade Charakteristik und je höher der Dämpfungsfaktor desto früher greift der Dämpfer-Anteil.
Grundsätzlich lässt sich sagen das die Feder bei kleinen Frequenzen dominiert, der Dämpfer bei mittleren und die Masse bei hohen Frequenzen.
Das selbe kann man nun auch für die Phase machen. Das wichtige ist das die Feder einen Winkel von 0 rad besitzt, der Dämpfer einen Winkel von
Was passiert wenn man eine Dämpfungskoeffizienten von 0 hat? Source
Die Phasendifferenz zwischen der Feder und der Masse führt dazu, dass die Energie schwingungsfähig zwischen ihnen ausgetauscht wird. Dadurch entsteht eine Phasendifferenz von 180°. Wenn es keine Dämpfung gibt, springt die Phasenverschiebung von 0 rad auf
Wenn man die Dämpfung erhöht dann wird der Resonanz Peak kleiner und wenn man die Dämpfung sehr hoch einstellt kommt gar keine Resonanz vor. Die Steigung der Phasendifferenz wird mit der Erhöhung des Dämpfungsfaktors immer kleiner. Das nennt sich dann auch kritisch gedämpt.