PID feedback control
Hier geht es um de PID-Feedback control design.
Heißt das hoher Gain bei niedrigen Frequenzen und niedriger Gain bei hohen Frequenzen. Robustheit beim Amplitudennullübergang (Cross-Over Frequenz), damit bei geschlossener Feedback Loop gutes kontrolliertes Verhalten gewährleistet werden kann.
Stabilität
Ein closed Loop System ist stabil wenn es keine Pole in der rechten reellen Hälfte besitzt. Das geschlossene System darf nicht zum oszillieren anfangen. Mathematisch gesehen heißt das, dass die Übertragungsfunktion des geschlossenen Systems
Robustheit und Stabilität des offenen Kreises
Die Stabilität und Robustheit des offenen Kreises sind wichtig um ein gutes kontrollierbares Verhalten im geschlossenen Kreis zu erhalten. Diese beschreibt wie viel unvorhergesehene Störungen auf ein System wirken können bevor es instabil wird.
Phasenrand - Phase Margin
Dieser beschreibt den Abstand der Phase von -180° an dem Punkt an dem die Amplitude
Amplitudenreserve - Gain Margin
Dieser beschreibt den Abstand der Amplitude von
Welche Regler gibt es?
- P-Regler
- PD-Regler
- PID-Regler
P-Regler
Der P-Regler verschiebt die Amplitude um eine gewünschte Cross-over Frequenz zu erhalten. Die Phase bleibt bei -180°. Der Open Loop sieht dann so aus:
PD-Regler
Der Proportionalanteil reagiert direkt auf den Fehler, währen der Differenzierer auf die Änderung des Fehlers reagiert und somit die Dynamik des Systems verbessert, indem er schnelle Änderungen im Fehler erkennt und darauf reagiert. Um den Differenzierer realisierbar zu machen wird ein PT1-Glied hinzugefügt um den
PID-Regler
Formel im s-Bereich ist:
Closed Loop: Feedback erlaubt es Pole neu zu platzieren:
- für besseres Verhalten
- System stabil machen
Loop-Shaping (Design)
Die Antwort des offenen Systems wird so angepasst dass das geschlossene System das gewünschte Verhalten zeigt:
- Hohe Verstärkung bei niedrigen Frequenzen
- Niedrige Verstärkung bei hohen Frequenzen
- entsprechend hoher Phasenrand(Phase Margin) und Amplitudenreserve (Gain Margin)
- mehr als -180° Phase-Lag bei Cross-Over Region
Rauschunterdrückung
Die Übertragungsfunktion des Rauschens in
S... Sensitivity function ... Wie gut werden Störungen unterdrückt
T... Complementary sensitivity function ... wie gut folgt man der Referenzsignal
Diese beiden Funktionen können nicht unabhängig voneinander getuned werden.
z.B. wird
Regler Design für CD-Player
Anforderungen:
- Positionierung mit Nanometer Auflösung mit dem Fokus Aktor
- Positionierer wird von Drähten gehalten und mittels Lorentz Aktuator bewegt
- Ein Spannungsverstärker treibt den Aktor an
- Ein Laser Interferometer misst die Position des Positionierers
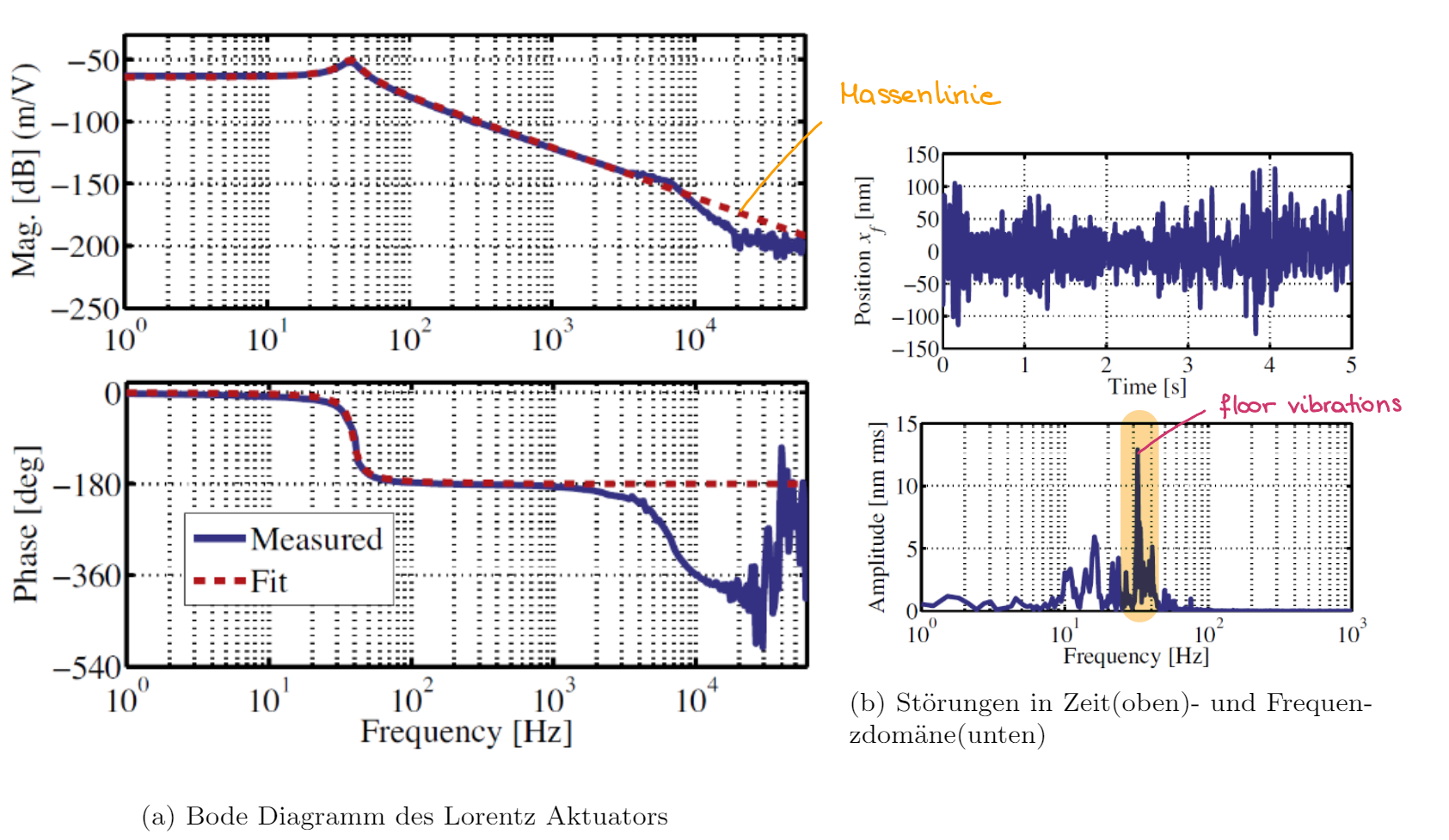
- Vibrationen des Bodens sind Hauptstörungen
- Störungsspektrum wird mittels FFT berechnet
Modellierung:
Das Antriebssystem kann als gedämpftes Feder Masse System betrachtet werden und die Spuleninduktion kann vernachlässigt werden. Die Vibrationen wirken auf das System selber und treten demnach zwischen Regler und Systemblock auf.
Man kann sich jetzt die Frage stellen: Wie groß muss die Bandbreite sein, damit Störungen unterdrückt werden?
Betrachtet man nun das Bode-Diagramm eines Lorentz-Aktuator erkennt man die Erste Resonanz bei 40Hz und dank der Phase die zweite bei 7kHz. Ab ca. 100Hz ist die Masse Linie dominant. Bis ca 1kHz stimmt das Model mit den Messdaten überein. Man erkennt auch das die Störungen in einem Bereich von 10-100Hz liegt. Warum jetzt die Bandbreite von 1kHz vorhanden sein sollte versteh ich aber jetzt nicht.
Tamed PID Regler
Der Regler muss die Phase bei der gewählten Cross Over Frequenz anheben und bei niedrigen Frequenzen eine hohe Verstärkung liefern. Für die Implementierung wünscht man sich eine niedrige Ordnung.
dabei ist
Außerdem gibt es die sogenannte Rule of Thumb (Daumenregel): Der I-Anteil endet bei ca.
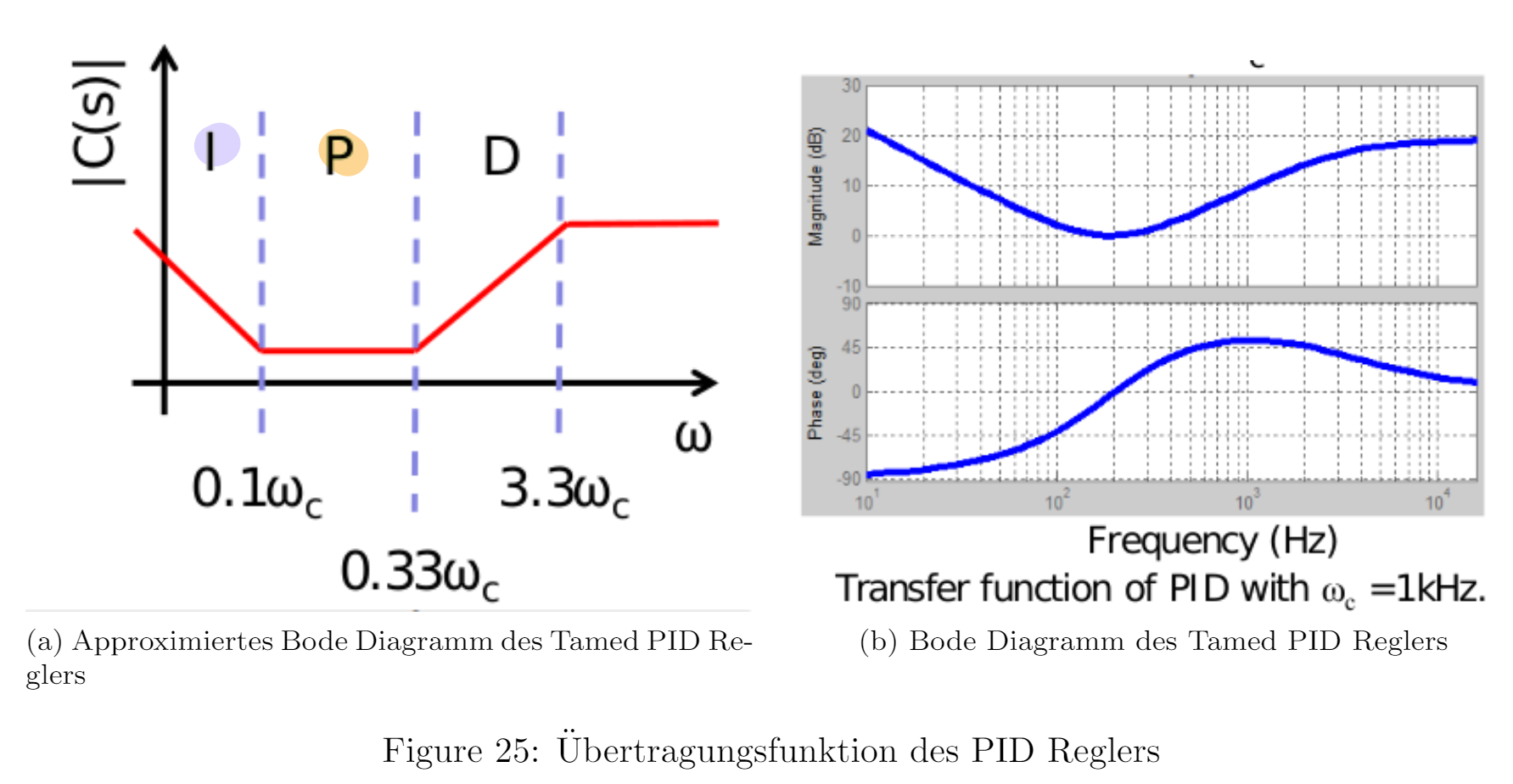
Für das Bild wurde ein
In der Vorlesung wurde auch eine Case study durchgeführt, dabei sollte man die Robustness rauslesen.
Die Phase Margin ist kann man bei der Cross Over Frequenz ablesen, also die Phase bei der 0 dB Linie.
Wie kann man die Gain margin ablesen? Wenn ich das Richtig verstanden hab wenn die wir unter -180° sind bei der 0dB linie. Sicher bin ich mir aber nicht.
Wie kann man die Closed Loop checken?
Indem man die Sensitivitätsfunktion überprüft ob dort Störungen auftreten. Die Sensitivitätsfunktion lautet:
Mittels Notch Filter kann man Frequenzen rausfiltern.
Phase Budget
Prinzipien
Aktuator, Mechanische Struktur und Verstärker spielen zusammen
Mindestens ein Tiefpass im System (z.B. Verstärker)
Resonanzen verursachen immer einen Phasenverschub von 90°
Es muss zwischen Federungs-Moden und Strukurelle-Moden unterschieden werden
Sensor hat Tiefpassverhalten und Aliasing (Tiefpass für Frequenzen größer als Abtastfrequenz)
Regler benötigt Integrator-Verhalten (im System oder Regler)
Integrator muss 0dB Linie kreuzen und verursacht 90° Phasenverschub
Digitale Regler Sampling Rate
Niedriges Sampling mehr Delay und starkes Aliasing
Für große Bandbreite muss der Phasenverschub minimal sein. Schnelle Sensoren und Abtastzeiten sind einfacher und billiger als schnellere Mechanik